Intelligent Control Switching for Autonomous Vehicles based on Reinforcement Learning
Jul 19, 2022· ,,,·
0 min read
,,,·
0 min read
Hussam Atoui
Olivier Sename
Vicente Milanes
John J. Martinez
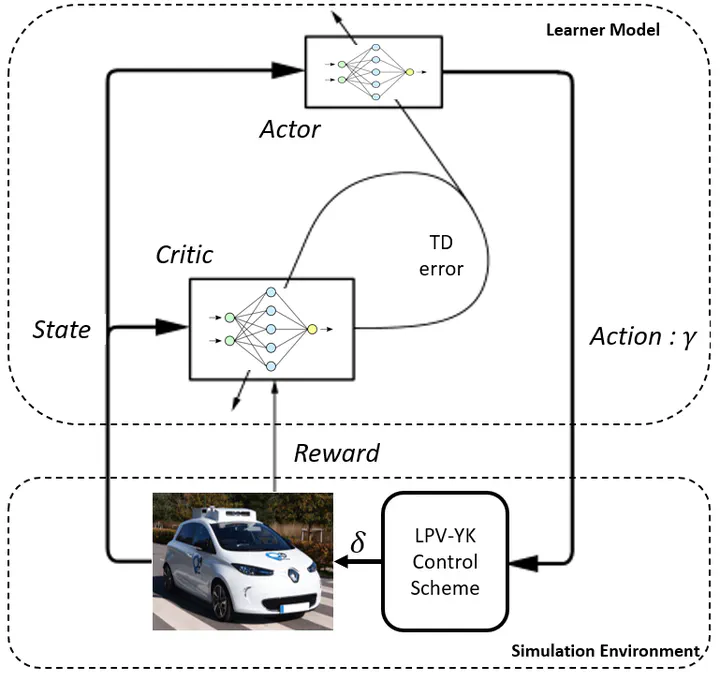 Image credit: Hussam Atoui
Image credit: Hussam AtouiAbstract
This paper presents the design and implementation of an intelligent switched control for lateral control of autonomous vehicles. The switched control is designed based on Linear Parameter-Varying (LPV) and Youla-Kucera (YK) parameterization. The proposed intelligent system aims to optimize the control switching performance using a Reinforcement Learning (RL) model. The presented approach studies the critical problem of initial or sudden large lateral errors in lane-tracking or lane-changing. It ensures stable and smooth switching performance to provide a smooth vehicle response regardless of the lateral error. The proposed RL-based switching strategy is validated using a RENAULT simulator on MATLAB, and compared to another modeled switching strategy with encouraging results.
Type
Publication
IEEE Intelligent Vehicles Symposium (IV)